Piezo Motors
DSM offers a non-magnetic, high vacuum compatible, piezo motor for longer travel applications and a rotary ultrasonic motor in both a compact integrated unit and a non-magnetic version. Where actuators/stages rely only on piezoceramic stack expansion to move and so have limited travel, piezo motors have practically limitless linear or rotational travel by using complex piezo structures and drive/control electronics to move. Piezo motors can be vacuum compatible, non-magnetic and hold position with zero-power. DSM can scale and modify existing architectures to meet customer specifications.
3 ready-to-order models are available. Contact us for customized solutions.
Choose a Product Category
Linear Motor Stage
Precise position, encoder feedback

Rotary Ultrasonic Motor
Power off hold, encoder feedback

Custom Motor Examples
Application-driven size, stroke, speed
Linear Motor Stage and Driver
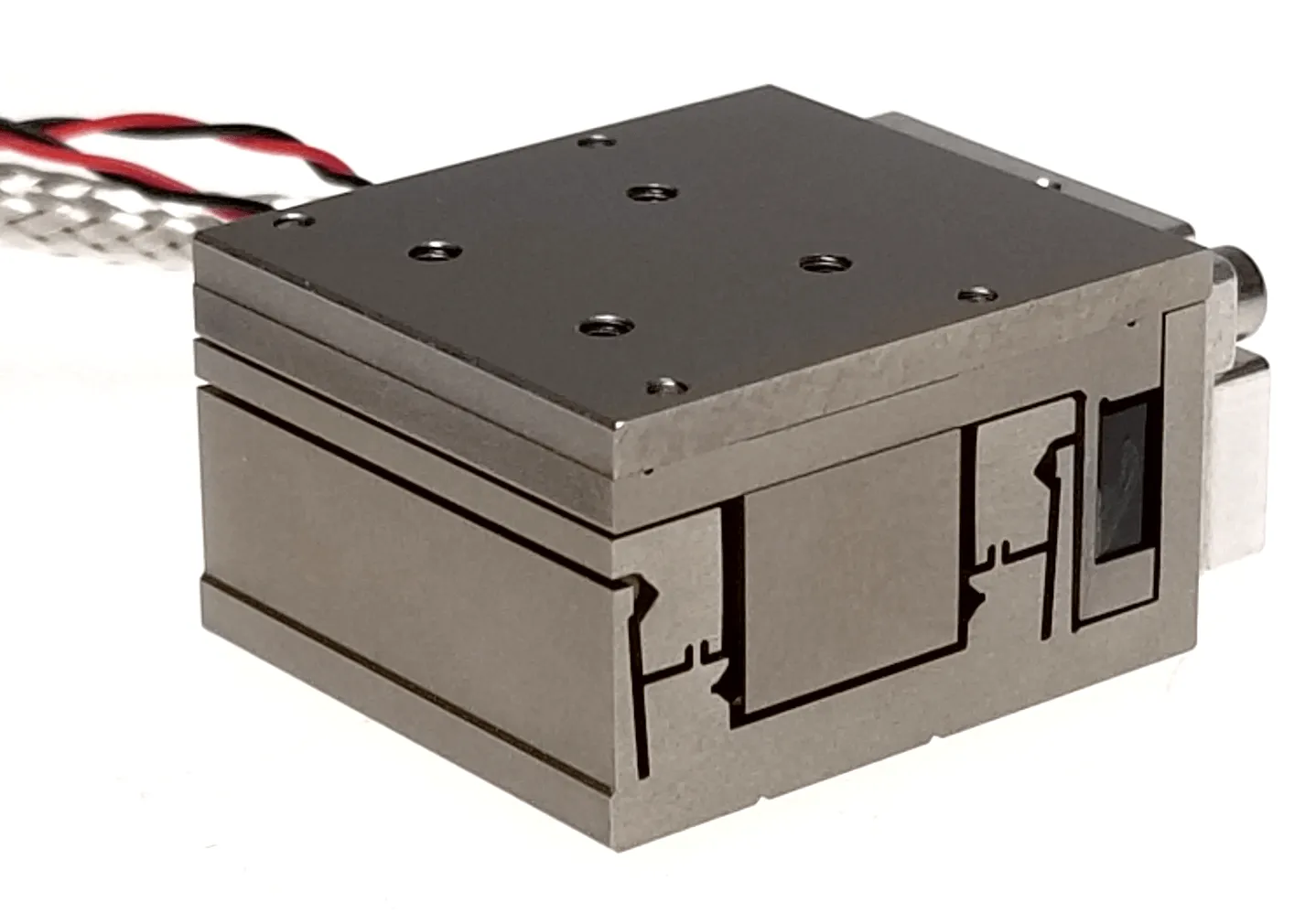
High performance piezo linear translation stage with integrated non-magnetic cross-roller bearings. Body and structural elements are titanium. Piezoelectric elements use non-magnetic materials. Standard unit has 300 series stainless steel screws/hardware and the option for all non-ferrous screws/hardware is available. Highlights: vacuum environment compatible, magnetic environment compatible, and zero power / power off position lock.
I-20 Piezo Motor
Linear Travel, Compact Form Factor
- 15mm Travel
- Vacuum compatible
- Integrated non-magnetic cross-roller bearings
- Zero power / power off position lock
- Magnetic environment compatible

MD-90 Motor Driver
Closed-Loop, Quadrature Feedback
- 1-channel Motor Driver OR
- 2-channel Linear Amplifier
- Quadrature or Analog Feedback
- -30V to +150V Output Voltage
- 90mA rms continuous current
- 2mVrms noise on output
- Interface with USB, RS-232
Rotary Ultrasonic Motors and Drivers
The SUM-40 is a direct drive piezo ultrasonic motor with an integrated amplifier, controller, and optical encoder that gives the user closed loop control in a compact package.
The SUM-40NM is a direct drive piezo ultrasonic motor with an integrated optical encoder that gives the user closed loop control in a compact package. Despite its small size, the SUM-40NM boasts a continuous torque of 50 mN-m while the integrated optical encoder provides 130 microradian resolution.
SUM-40 Ultrasonic Motor
Integrated Driver, and Closed-Loop Controller
- Complete System: Motor and driver
- Integrated optical encoder
- Continuous torque 50 mN-m
- 130 microradian resolution
- 12V Input voltage
- Interface with USB-C, RS-232

SUM-40NM Ultrasonic Motor
For use with external driver
- For use with UMD3.1 Ultrasonic motor driver
- Fully Non-magnetic, with electronics externally placed
- Continuous torque 50 mN-m
- 130 microradian resolution

UMD3.1 Ultrasonic Driver
Drives three SUM-40NM motors
- Three channels
- Separate driver allows electronics to be away from magnetic field
- Closed loop control using encoder feedback
- 130 microradian resolution
- Interface with USB, RS-232
Custom Motor Examples
DSM Model I-90 Piezo Motor
Total macro stroke: 25 mm (0.98 in). Actual value is determined by motor design. Designs can be configured for increased travel.
Motion resolution: Sub-micron step capability using micro stepping driver
Dimensions: Approximately 63 mm x 57 mm x 18 mm (2.5 in x 2.3 in x 0.7 in) depending on force specification
Motor speed: Up to 30 mm/sec depending upon the motor architecture and driving frequency.
Output force: 90 N (20.2 lbf)
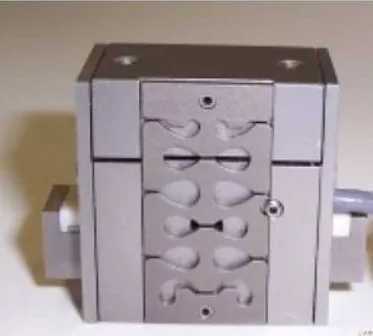
DSM Model CS-12-60 Piezo Motor
Total macro stroke: Typically 3 to 25 mm. Actual value is determined by motor design. Designs can be configured for increased travel.
Motion resolution: Sub-micron step capability using micro stepping driver.
Dimensions: Approximately 17 mm x 29 mm x 30 mm (0.67 in x 1.14 in 1.18 in) depending on force specification.
Motor speed: Up to 30 mm/sec depending upon the motor architecture and driving frequency.
Output force: Force levels for current models range between 20 N to 100 N (5 to 22 lbf) depending on motor frame size and piezoelectric size. The motor can be configured for power-off slip or power-off hold.

DSM Model I-30 Piezo Motor
Total macro stroke: 10 mm (0.4 in). Actual value is determined by motor design. Designs can be configured for increased travel.
Motion resolution: Sub-micron step capability using micro stepping driver.
Dimensions: Approximately 24 mm x 14 mm x 48 mm (0.95 in x 0.55 in 1.89 in) depending on force specification.
Motor speed: Up to 30 mm/sec depending upon the motor architecture and driving frequency.
Output force: 30 N (6.7 lbf). The motor can be configured for power-off slip or power-off hold.
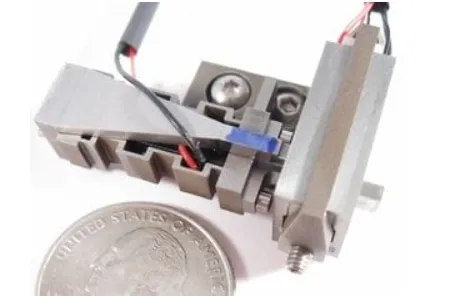
DSM Model PS3-UL Piezo Motor
Total macro stroke: 3 mm (0.12 in). Actual value is determined by motor design. Designs can be configured for increased travel.
Motion resolution: Sub-micron step capability using micro stepping driver.
Dimensions: Approximately 44 mm x 29 mm x 15 mm (1.7 in x 1.1 in x 0.6 in) depending on force specification.
Motor speed: Up to 80 mm/sec depending upon the motor architecture and driving frequency.
Output force: 50 N (11 lbf). The motor can be configured for power-off slip or power-off hold.

DSM Model SQ-150 Piezo Motor
Total macro stroke: 5 mm (0.2 in). Actual value is determined by motor design. Designs can be configured for increased travel.
Motion resolution: Sub-micron step capability using micro stepping driver.
Dimensions: Approximately 36 mm x 36 mm x 71 mm (1.4 in x 1.4 in x 2.8 in) depending on force specification.
Motor speed: Up to 150 mm/sec depending upon the motor architecture and driving frequency.
Output force: 151 N (34 lbf). The motor can be configured for power-off slip or power-off hold.
